标签列表 - 深圳市日弘忠信实业有限责任公司
-
 上海松下伺服电机保存参数
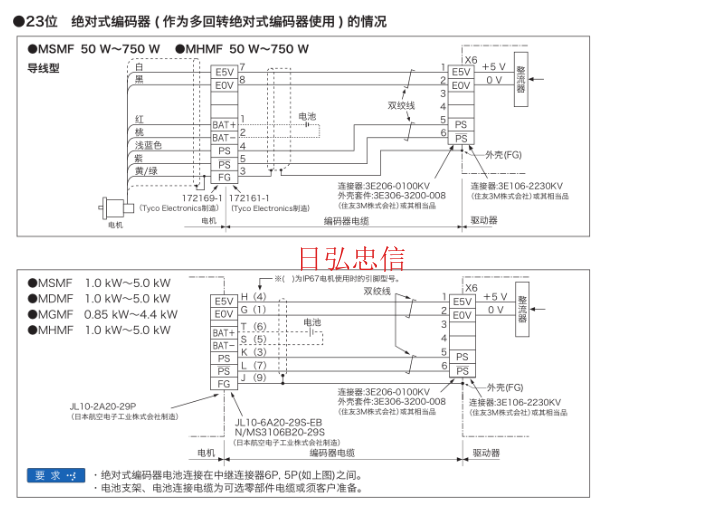
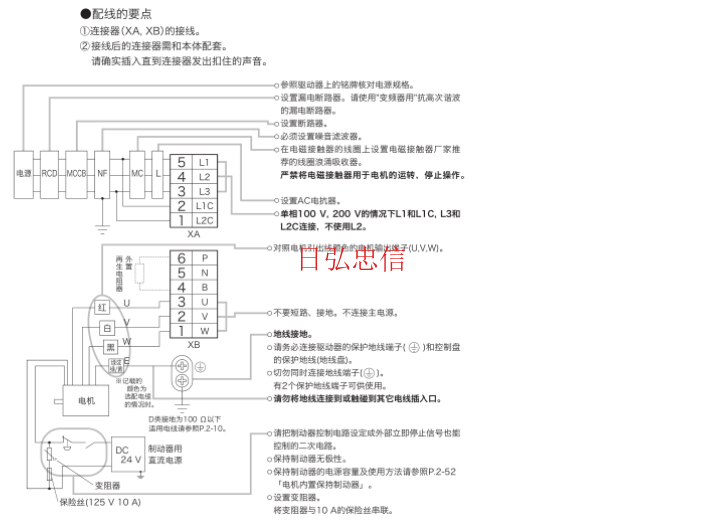
上海松下伺服电机保存参数松下伺服驱动器,连接示例(C~D型的情况 ) 为了保护电源线路,请务必安装与电源容量相匹配的配线断路器以作为过电流保护装置。噪音滤波器(NF)抵御从电源线路产生的外部噪音。另外,降低来自驱动器的噪音干扰。电磁接触器(MC)接通/断开驱动器的主电源,安装线圈浪涌吸收器后进行使用。·严禁将电磁接触器用于电机的运转、停止操作。电抗器(L)可降低电源的高次谐波电流。短接线(RB-B)地线端子※记载的颜色为选配电缆时的情况。制动器用中继电缆制动器用直流电源DC24V(需客户准备)P(6PIN)B(4PIN)U相(红)V相(白)W相(黑)■电源输入连接器的配线(XA)■外部零部件连接器的配线(X...
发布时间:2023.04.22 -
 天津松下伺服电机连接器
天津松下伺服电机连接器自动调整由上位的动作指令或由安装调试软件「PANATERM」发出的动作指令在电机驱动状态下,实时推测判定负载惯量,自动设定与刚性设定相对应的增益。反馈脉冲的分频功能脉冲数可任意设定。(但是,不能超过编码器反馈脉冲数)保护功能硬件错误过电压、电压不足、过速度、过负载、过热、过电流、编码器异常等软件错误位置偏差过大、指令脉冲分频、EEPROM异常等报警数据跟踪功能可参照报警数据的历史记录无限旋转***式功能可使用劣化诊断功能可使用控制输入偏差计数器***、指令脉冲禁止输入、指令分倍频切换、制振控制切换等控制输出定位结束等脉冲输入比较大指令脉冲频率数500kpulse/s(光电耦合器长线驱动器输入使...
-
 南通松下伺服电机 a4
南通松下伺服电机 a4松下伺服电机,位置控制型: 制振控制同时可使用**多3个模型型制振滤波器同时可使用**多2个2自由度控制可使用负载变动抑制控制可使用位置比较输出功能可使用【条件】Block动作有效设定增量式模式时原点复位完成状态(Block动作原点复位无效化设定为无效设定时)全闭环控制时外部位移传感器位置信息监视器功能不可使用Block动作可使用*1控制输入内部指令速度选择1、内部指令速度选择2、内部指令速度选择3、零速箝位等控制输出速度到达等内部速度指令可根据控制输入切换8个内部速度。软启动/断电功能可分别设定加速·减速,S型加减速亦可。零速箝位根据零速箝位输入,可将内部速度指令固定为0。2自由度...
-
 武汉松下伺服电机下载
武汉松下伺服电机下载制振控制同时可使用**多3个模型型制振滤波器同时可使用**多2个2自由度控制可使用负载变动抑制控制可使用位置比较输出功能可使用【条件】Block动作有效设定增量式模式时原点复位完成状态(Block动作原点复位无效化设定为无效设定时)全闭环控制时外部位移传感器位置信息监视器功能不可使用Block动作可使用*1控制输入内部指令速度选择1、内部指令速度选择2、内部指令速度选择3、零速箝位等控制输出速度到达等内部速度指令可根据控制输入切换8个内部速度。软启动/断电功能可分别设定加速·减速,S型加减速亦可。零速箝位根据零速箝位输入,可将内部速度指令固定为0。2自由度控制可使用负载变动抑制控制可使用位置比...
-
 福建松下伺服电机法兰图片
福建松下伺服电机法兰图片动态制动器在下列场合可动作 松下伺服电机 ①主电源关闭时②伺服使能关闭时③保护功能动作时④连接器X4的驱动禁止输入(NOT、POT)动作时可通过参数选择设定,在上述①~④的情况下,减速中或停止后,使用动态制动器进行动作还是自由运转。控制电源关闭时,A~F型驱动器的动态制动器为动作状态。G,H型驱动器的动态制动器则为解除状态。●当G型驱动器的内置动态制动器电阻阻抗不足时,可外置。●H型驱动器的动态制动器电阻可外置。外置动态制动器电阻的连接方法和G型一样。●请使用下述外置动态制动器电阻。(须客户准备) 松下伺服电机手动运行。福建松下伺服电机法兰图片松下伺服电机 松下伺服电机,使用...
-
 云南松下伺服电机调试增益
云南松下伺服电机调试增益输出轴的容许载重径向负载即输出轴径向承载的载重。 输出轴通过链条、皮带等与配套机械相连接时会产生径向载重,而与联轴器直接连接时则不会产生径向载重。如下图所示,通过在输出轴的L/2位置施加载重,设定容许值。此外,轴向载重即输出轴在轴向承载的载重。径向载重、轴向负载对轴承的寿命和强度有较大影响。因此,运转时的载重务必小于各页所记载的容许径向载重、容许轴向载重,请注意。AB轴向负载(A,B)方向径向负载(P)方向LL/2P轴电机电机内置制动器在利用电机驱动垂直轴等情况下,可防止切断驱动器电源时工件(可动部)因重力而掉落。电机内置制动器*用于在停止状态时“保持”。请勿用于使电机运转负载停止的...
-
 长沙松下伺服电机报警21
长沙松下伺服电机报警21安全转矩OFF(STO)功能概要所谓的安全转矩关闭(以下为STO)功能是从安全输入信号通过电路(硬件)强制关闭伺服驱动器内部的功率晶体管的驱动信号,以此切断电机电流,关闭电机输出转矩的安全功能。如果STO功能动作,伺服驱动器关闭伺服准备输出信号(S-RDY),变为STO状态,前面板表示为「St」。另外,STO输入状态解除且伺服使能关闭(OFF)时自动迁移到伺服使能关闭状态。安全上的注意●使用STO功能时,请务必确认是否实施了设备的风险评估,是否满足应用系统的安全要求。●即使STO功能有效,仍然会存在以下风险,请务必在风险评估中考虑以下因素的安全性。・有外力(如垂直轴的重力等)时电机会转动,需要...
-
 青岛松下伺服电机驱动器
青岛松下伺服电机驱动器动态制动器,松下伺服电机 ① 关闭主电源后,减速→停止的驱动条件设定(Pr5.07) DBDB自由运行自由运行DBDB自由运行自由运行DB自由运行自由运行DBDB************保持保持保持保持自由运行自由运行立即停止***DB立即停止***自由运行DB0Pr5.07的设定值129关闭主电源时时序(Pr5.07)驱动条件减速中停止后偏差计数器内容DBDB自由运行自由运行DBDB自由运行自由运行DB自由运行自由运行DBDB************保持保持保持保持自由运行自由运行DB0Pr5.06的设定值1234567伺服使能关闭时时序(Pr5.06)偏差计数器内容驱动条件...
-
 上海松下伺服电机驱动报价
上海松下伺服电机驱动报价松下伺服电机-定位完成输出(INP)功能 可通过定位完成输出(INP)确认定位完成的状态。在位置控制下,位置偏差计数值的***值在通过参数设定后的定位完成范围以下时变为ON。此外,可将位置指令的有无追加到判定条件中。 定位完成范围0~2097152指令单位设定输出定位完成信号(INP1)位置偏差的阀值。出厂时的设定单位是指令单位,可变更为Pr5.20「位置设定单位选择」编码器单位。但是,此时,Pr0.14「位置偏差过大设定」的单位也会被更改,请注意。 松下伺服电机图片100W/400W/750W。上海松下伺服电机驱动报价松下伺服电机 松下伺服电机:接口规格 I/F连接器...
-
 河北松下伺服电机cad
河北松下伺服电机cad松下伺服电机-INP保持时间 Pr4.32「定位完成输出设定」=3,8时,设定保持时间。0:保持时间无限大,到有下一个位置指令时,持续ON的状态。1~30000:持续只在设定值[ms]ON的状态。但是,保持时,一旦有位置指令,则为OFF状态。・Pr4.32「定位完成输出设定」=4,5,9,10时,设定定位判定延迟时间。0:无定位判定延迟时间,以无位置指令开始立即判定。1~30000:只在设定值[ms]定位判定开始时间会延迟。但,延迟时间中一旦有位置指令,则会重设延迟时间,此时的位置指令为0时,再度延迟时间的计算从0开始。 松下伺服电机换编码器。河北松下伺服电机cad松下伺服电机 松...
-
 宁波松下伺服电机模型下载
宁波松下伺服电机模型下载松下伺服电机: 制振控制切换输入1VS-SEL126(SI3)*・切换制振控制的适用频率。与制振控制切换输入2(VS-SEL2)配合使用比较大可切换4个。・详细请参照5-2-7-1项。○――○增益切换输入GAIN27(SI4)*・切换第1/第2增益。・详细请参照5-2-5项。○○转矩限制切换输入TL-SEL-・第1/第2转矩限制。・详细请参照6-1项。○○―○内部指令速度选择1输入INTSPD133(SI10)*―○――内部指令速度选择2输入INTSPD230(SI7)*・选择内部指令速度1~8速。・详细请参照4-3-2项。―○――内部指令速度选择3输入INTSPD328(SI5)*...
-
 湖南松下伺服电机a5系列
湖南松下伺服电机a5系列松下伺服电机 *1使用温度是距离电机5cm外的温度。*2预期的运输等短时间内的温度。*3符合EN标准(EN60529、EN60034-5)所规定的试验条件的电机。时常水洗等需常时间防水的情况下,不宜使用。*4以电机连接器、编码器连接器的推荐紧固转矩来紧固的情况下适用。*5温度降低的情况湿度会升高,易产生结露,请注意。*6MDMFD22L1□□的端子台是45%RH〜85%RH。*7额定输出容量在5.5kW以上的电机在旋转时,停止时是在24.5m/s2(2.5G)以下。 松下伺服电机扭力模式。湖南松下伺服电机a5系列松下伺服电机 松下伺服电机:接口规格 I/F连接器输入信...
-
漯河松下伺服电机331报警
松下伺服电机-位置指令滤波功能 如希望分倍频(电子齿轮)后的位置指令平滑,设定指令滤波器。■关联参数分类No.参数名称设定范围单位功能222指令平滑滤波器0~100000.1ms设定位置指令对应的1次延迟滤波器的时间常数。2自由度控制时,作为指令响应滤波器使用。详细相关请参照5-2-15「2自由控制模式(位置控制时)」5-2-17「2自由控制模式(速度控制时)」。223指令FIR滤波器0~100000.1ms设定位置指令对应的FIR滤波器的时间常数。・Pr2.22「指令平滑滤波器」相关针对目标速度Vc的方波指令,如下图所示设定1次延迟滤波器的时间常数。 松下伺服电机的抱闸控制。漯河松...
-
温州松下伺服电机接线手册
A6松下伺服电机:响应动作无效设定时(Pr5.42 bit0=0) 从站不返回响应。·从站数=2时命令主站从站响应轴编号1T3停顿间隔轴编号2T0T0T0T0:停顿间隔时间(3.5个字符、或0.75ms时长)T1:命令处理时间(随命令変化)T3:广播命令处理时间T3≧T0+T1主站请在经过T3时间后再发送下一次命令。(2)响应动作有效设定时(Pr5.42bit0=1)各从站根据各个参数设定,在以下时间内返回响应。此外,本规格与Modbus的标准规格不同,敬请注意。·从站数=2时命令主站从站响应轴编号1T3停顿间隔轴编号2停顿间隔T0T1T2×1T0以上T2×2T0T0T2以上T0:停...
-
武汉松下伺服电机回收
A6松下伺服电机:响应动作无效设定时(Pr5.42 bit0=0) 从站不返回响应。·从站数=2时命令主站从站响应轴编号1T3停顿间隔轴编号2T0T0T0T0:停顿间隔时间(3.5个字符、或0.75ms时长)T1:命令处理时间(随命令変化)T3:广播命令处理时间T3≧T0+T1主站请在经过T3时间后再发送下一次命令。(2)响应动作有效设定时(Pr5.42bit0=1)各从站根据各个参数设定,在以下时间内返回响应。此外,本规格与Modbus的标准规格不同,敬请注意。·从站数=2时命令主站从站响应轴编号1T3停顿间隔轴编号2停顿间隔T0T1T2×1T0以上T2×2T0T0T2以上T0:停...
-
浙江松下伺服电机故障21
松下伺服电机-前面板锁定 前面板锁定为了防止未预期参数的变更等的误操作,前面板可以调整为锁定状态。前面板锁定状态的制限项目如下表所示。模式前面板锁定状态监视器模式无制限,所有的监视器数据都可确认。参数设定模式不可变更参数。但可以确认参数的设定值。EEPROM写入模式不可执行。(不可显示。)辅助功能模式「前面板锁定解除」以外的辅助功能都不可执行。(不可显示。)■关联参数分类No.参数名称设定范围单位功能535前面板锁定0~1-根据前面板操作进行锁定。0:前面板操作非制限1:前面板操作锁定・锁定前面板的操作顺序[安装支援软件/前面板操作共通]①设定Pr5.35「前面板锁定」=1,向EEP...
-
 无锡松下伺服电机批发
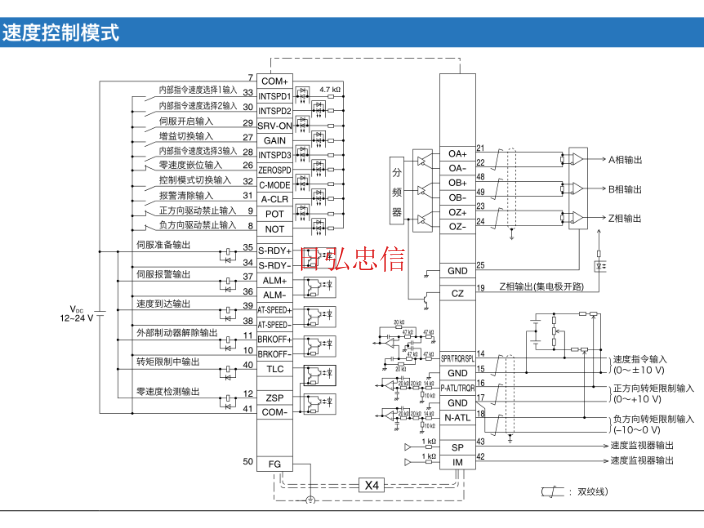
无锡松下伺服电机批发A6系列松下伺服电机-通过模拟速度指令进行速度控制 将模拟速度指令输入(电压)进行AD转换,获取数字值,此数值会转换为速度指令。为了去除噪音,可设定滤波器以及进行零漂调整。 速度设定内外切换 选择速度控制模式时的速度指令输入方式。 0:模拟速度指令(SPR) 1:内部速度设定第1速~第4速 2:内部速度设定第1速~第3速,模拟速度指令(SPR) 3:内部速度设定第1速~第8速 速度指令方向指定选择 选择速度指令的正方向/负方向的指定方法。 0:指定速度指令的符号方向。例)速度指令输入「+」→正方向,「-」→负方向 1:指定速...
-
上海松下伺服电机软件图标
松下A6伺服电机-电池更新 电池更新执行电池更新动作。[选择显示][执行显示]■按SET切换为执行显示。执行电池更新时,持续按直至显示切换为。按下(不要长按)电池更新完成电池更新执行中电池更新强制结束发生错误[原因]・连接了23bit绝对式编码器以外的编码器・全闭环控制模式设定了(Pr.0.01=6)・使用增量式模式(Pr.0.15=1)电池更新开始持续按(约5秒)则会增加如右图所示「-」。结束注1)一旦实行电池更新,有可能发生电池警告。此时,请进行电池警告***。No.SX-ZSV00014-42-松下电器产业株式会社马达经营单位MotorBusinessUnit,Panasoni...
-
 广东松下伺服电机 手册
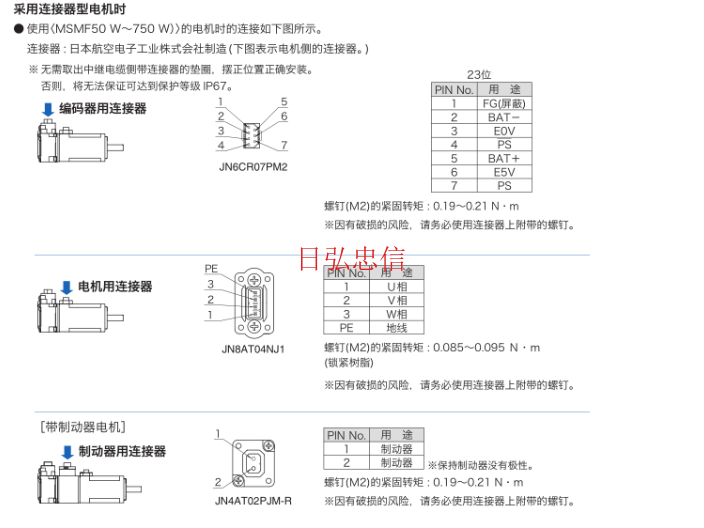
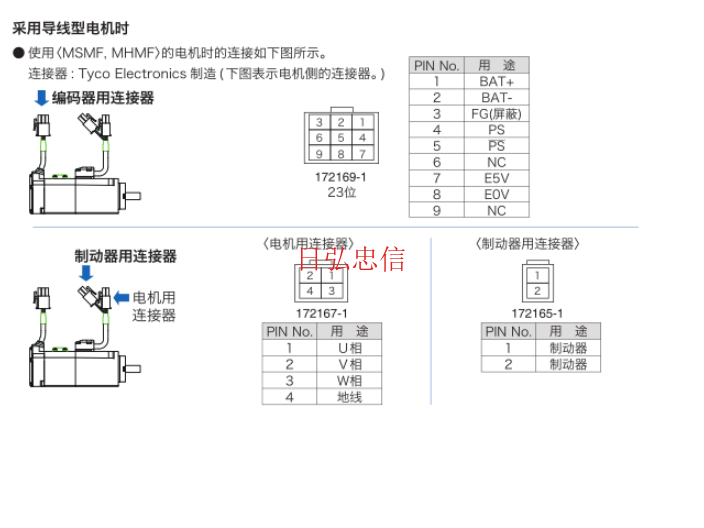
广东松下伺服电机 手册松下伺服电机:A6/A5/A4动力线接线方法 A6/A5/A4驱动器动力线UVW与电机的接线方法:(动力线芯至少要大于或者等于0.5mm(标配是4X0.75mm或2.5mm))驱动器端:U相(红色),V相(白色),W相(黑色),接地螺丝(黄绿);电机端(不带制动器750W以下或者是750W的白色接头):1接U相(红色),2接V相(白色),3接W相(黑色),4接接地螺丝(黄绿);电机端(不带制动器750W以上的航空插头):A接U相(红色),B接V相(白色),C接W相(黑色),D接接地螺丝(黄绿);电机端(带制动器750W以上的航空插头):F接U相(红色),I接V相(白色),B接W相(黑...
-
 江苏松下伺服电机刹车调节
江苏松下伺服电机刹车调节A6松下伺服电机:功能码 (1)读取线圈(01h)发送返回异常响应从站地址从站地址从站地址01h01h81h线圈起始地址高位数据字节数(N)例外码低位数据1CRC低位线圈数高位数据2高位低位CRC低位高位数据NCRC低位高位·*返回由线圈起始地址中设置的地址开始的线圈数对应的线圈信息。·关于数据字节数(N),用线圈数除以8,没有余数时,直接返回商,有余数时,返回“商+1”。·有余数时,在***的数据中指定的线圈数的范围外为「0」。·例外码01h功能码异常02h数据地址异常03h数据异常04h响应处理异常(2)读取寄存器(03h)发送返回异常响应从站地址从站地址从站地址03h03h83...
-
 山西松下伺服电机 脉冲
山西松下伺服电机 脉冲松下伺服电机-前面板锁定 前面板锁定为了防止未预期参数的变更等的误操作,前面板可以调整为锁定状态。前面板锁定状态的制限项目如下表所示。模式前面板锁定状态监视器模式无制限,所有的监视器数据都可确认。参数设定模式不可变更参数。但可以确认参数的设定值。EEPROM写入模式不可执行。(不可显示。)辅助功能模式「前面板锁定解除」以外的辅助功能都不可执行。(不可显示。)■关联参数分类No.参数名称设定范围单位功能535前面板锁定0~1-根据前面板操作进行锁定。0:前面板操作非制限1:前面板操作锁定・锁定前面板的操作顺序[安装支援软件/前面板操作共通]①设定Pr5.35「前面板锁定」=1,向EEP...
-
 江苏松下伺服电机维修拆解
江苏松下伺服电机维修拆解A6松下伺服通信异常时: 从站无法正常接收从主站发行的命令时,会无视命令,不返回响应。·检测出通信错误时命令主站从站一定期间通信异常发生无响应请参考2-1-3-1项、2-1-3-2项的时序图,如果一定期间主站未收到从站的响应,则判断为超时。此外,针对主站的命令接收间隔,从站可以根据Pr5.40“Modbus通信超时时间”的设定检测出超时。关联参数分类No参数名称设置范围单位功能・内容540Modbus通信超时时间0~10000ms在确保了Modbus执行权限的状态下,由本轴指定的或由广播指定Modbus通信,从上次的收取经过此参数设置的时间以上依旧没有收到数据时,引发Err80.0「...
-
 徐州松下伺服电机代理
徐州松下伺服电机代理松下伺服电机-电子齿**能 具有将上位控制器输入的脉冲指令与已设定的分倍频的比相乘的值作为位置控制部的位置指令的功能。通过此功能,可任意设定单位输入指令脉冲的电机旋转・移动量,由于高位控制器的脉冲输出能力的限制,电机达不到所要的速度时,可以增大指令脉冲频率。 *1全闭环控制时,请固定指令分倍频。有发生Err25.0(混合偏差过大异常保护)的情况。*2虽然分母、分子的数值可设定为任意值,但在设定了极端的分频比或者倍频比时,无法保证其动作。请在1/1000〜8000倍之间选取分频·倍频比的范围。此外,即使在上述的范围内倍频还是较高的情况下,由于指令脉冲输入的偏差或噪音有时会发生Er...
-
 深圳松下伺服电机选购攻略
深圳松下伺服电机选购攻略松下伺服电机-脉冲再生功能 可从伺服驱动器中将移动量用AB相脉冲方式传送到上位控制器。此外,输出源为编码器时,Z相信号为电机每旋转1次输出一次,输出源为外部反馈尺时,***位置为零的情况下输出。此时的输出分辨率以及B相逻辑、输出源(编码器、外部反馈尺)可用参数进行设定。4-2-4-1脉冲分频功能■关联参数分类No.参数名称设定范围单位功能011每旋转1圈的输出脉冲数1~2097152P/r通过OA、OB各自每旋转1圈输出的脉冲数来设定脉冲输出分辨率。高位侧为4倍频处理脉冲计数的情况下如下所述。每旋转1圈的脉冲输出分辨率=Pr0.11设定值×4012脉冲输出逻辑反转/输出源选择0~3-...
-
许昌松下伺服电机减速器
A6松下伺服通信异常时: 从站无法正常接收从主站发行的命令时,会无视命令,不返回响应。·检测出通信错误时命令主站从站一定期间通信异常发生无响应请参考2-1-3-1项、2-1-3-2项的时序图,如果一定期间主站未收到从站的响应,则判断为超时。此外,针对主站的命令接收间隔,从站可以根据Pr5.40“Modbus通信超时时间”的设定检测出超时。关联参数分类No参数名称设置范围单位功能・内容540Modbus通信超时时间0~10000ms在确保了Modbus执行权限的状态下,由本轴指定的或由广播指定Modbus通信,从上次的收取经过此参数设置的时间以上依旧没有收到数据时,引发Err80.0「...
-
 青岛松下伺服电机测量好坏
青岛松下伺服电机测量好坏A6松下伺服电机:功能码 (1)读取线圈(01h)发送返回异常响应从站地址从站地址从站地址01h01h81h线圈起始地址高位数据字节数(N)例外码低位数据1CRC低位线圈数高位数据2高位低位CRC低位高位数据NCRC低位高位·*返回由线圈起始地址中设置的地址开始的线圈数对应的线圈信息。·关于数据字节数(N),用线圈数除以8,没有余数时,直接返回商,有余数时,返回“商+1”。·有余数时,在***的数据中指定的线圈数的范围外为「0」。·例外码01h功能码异常02h数据地址异常03h数据异常04h响应处理异常(2)读取寄存器(03h)发送返回异常响应从站地址从站地址从站地址03h03h83...
-
广东松下伺服电机停止异常
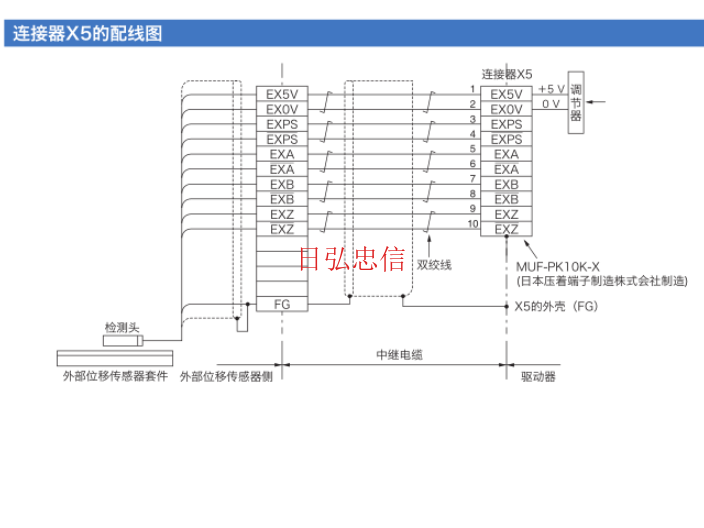
松下伺服电机-外部位移传感器的脉冲再生功能 串行***式外部位移传感器・Z相与驱动器的控制电源接通后,外部位移传感器的***位置横穿过零点时,***输出。此位置以Pr6.21设定的A相脉冲间隔为基准输出Z相。但Pr6.21=0时,*在***位置零点输出Z相。■串行增量式部位移传感器(株式会社Magnescale外部位移传感器制SR75,SR85)・Z相是通过串行增量式外部位移传感器的Z相输出(未分频)。或Z相通过的方向会有如下图所示的不同,请注意。 1Z相位置与A相,B相的关系根据外部位移传感器不同。以上图为例。*2Z相是再生了外部位移传感器原信号的1个脉冲。宽度较窄时,通过P...
-
 云南松下伺服电机生产产地
云南松下伺服电机生产产地A6松下伺服电机 Modbus通信规格 Modbus通信规格2-1-1通信线路的连接(1)使用RS-232物理层的情况将Pr5.37「Modbus连接设置」设置为1,可通过RS232进行1:1的Modbus通信。X2RXDTXDGNDTXDRXDGND上位控制器伺服驱动器RS232接口SN751701同等品431No.SX-ZSV00015-5-R2.1松下电器产业株式会社马达经营单位MotorBusinessUnit,PanasonicCorporation(2)使用RS-485的物理层的情况将Pr5.37「Modbus连接设置」设置为2,可通过RS485进行1:N的Modbus通...
-
青岛松下伺服电机扭矩
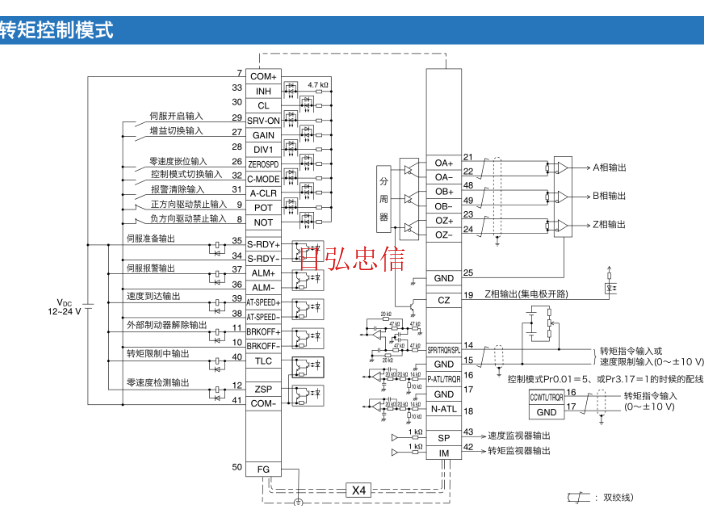
松下伺服电机: 制振控制切换输入1VS-SEL126(SI3)*・切换制振控制的适用频率。与制振控制切换输入2(VS-SEL2)配合使用比较大可切换4个。・详细请参照5-2-7-1项。○――○增益切换输入GAIN27(SI4)*・切换第1/第2增益。・详细请参照5-2-5项。○○转矩限制切换输入TL-SEL-・第1/第2转矩限制。・详细请参照6-1项。○○―○内部指令速度选择1输入INTSPD133(SI10)*―○――内部指令速度选择2输入INTSPD230(SI7)*・选择内部指令速度1~8速。・详细请参照4-3-2项。―○――内部指令速度选择3输入INTSPD328(SI5)*...
-
江苏松下伺服电机按键说明
A6松下伺服电机:Moddbus数据结构 发送命令(主站→从站)从站地址(1byte)功能码(1byte)数据(0~252byte)CRC(2byte)从站地址00h广播地址01h~F7h从站地址功能码功能码功能内容01h读取线圈读取线圈信息。03h读取寄存器读取监视器、参数等的寄存器。05h写入线圈向线圈写入。06h写入寄存器向寄存器写入。08h通信诊断回环测试0Fh写入复数线圈向复数的线圈写入。10h写入复数寄存器向复数的寄存器写入。数据由于功能码不同而有所不同。No.SX-ZSV00015-12-R2.1松下电器产业株式会社马达经营单位MotorBusinessUnit,Pan...
热门标签