商机详情 -
亳州自动搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构, 采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,PLC控制。亳州自动搬运机械手
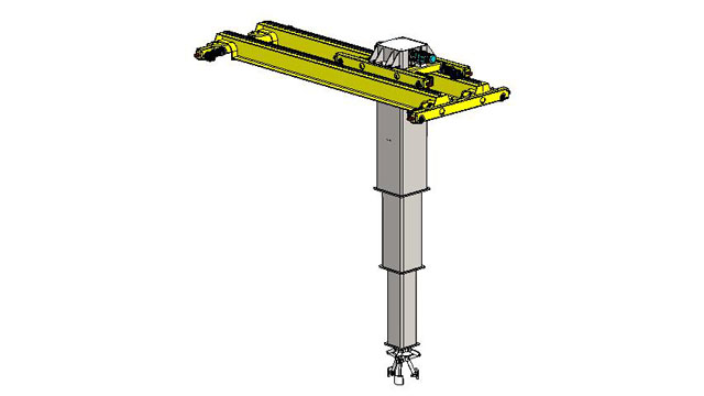
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应; 2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。马鞍山手动搬运机械手南京搬运机械手,南京高锐特有限公司。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点: 1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。
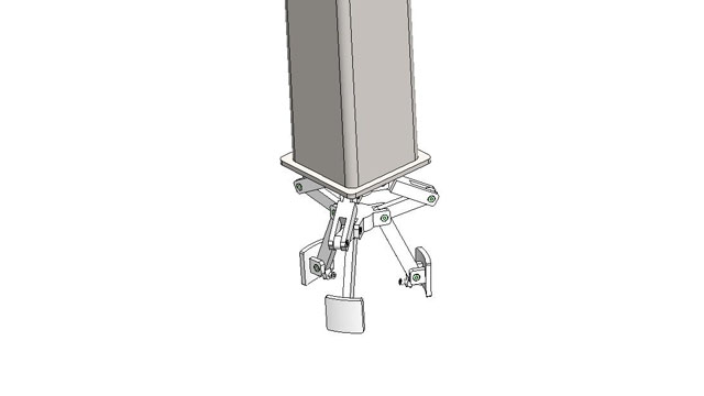
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置; 6.气动抓取机械手设有断气保护装置,防超程装置等; 7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,气动抓手,PLC控制。南京高锐特起重机有限公司生产。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、 导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,气动抓手,PLC控制。南京高锐特起重机械有限公司生产。自动搬运机械手生产商
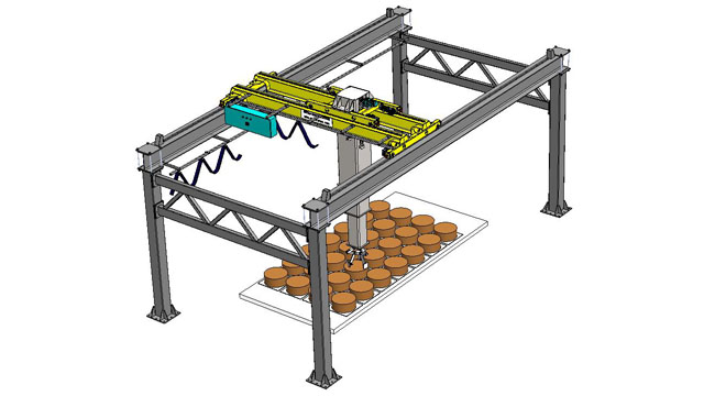
三坐标搬运机械手,操作方式有半自动和全自动两种。亳州自动搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长; 3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。亳州自动搬运机械手
南京高锐特起重机械有限公司在起重输送机械,自动起重输送,智能起重输送,电动葫芦一直在同行业中处于较强地位,无论是产品还是服务,其高水平的能力始终贯穿于其中。南京高锐特起重是我国机械及行业设备技术的研究和标准制定的重要参与者和贡献者。公司承担并建设完成机械及行业设备多项重点项目,取得了明显的社会和经济效益。多年来,已经为我国机械及行业设备行业生产、经济等的发展做出了重要贡献。